RAN Simulator
This software allows simulation of a number of RAN CU/DU nodes and RU cells via the O-RAN E2AP standard. The simulated RAN environment is described using a YAML model file loaded at start-up. The simulator offers a gRPC API that can be used at run-time to induce changes in order to simulate a dynamically changing environment.
The main RAN simulator software is accompanied by a number of utilities that allow generation of YAML files that describe large RAN topologies and various environmental metrics, e.g. PCI.
CLI for the RAN simulator is available via onos-cli ransim usage and allows access to all major features of
the simulator gRPC API, for controlling and monitoring the changes to the simulated environment.
Architecture
The following figure outlines the RAN simulator architecture:
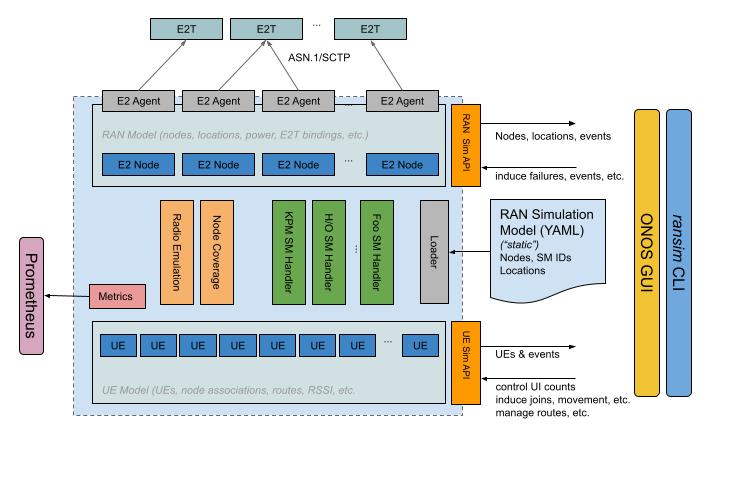
E2 nodes: Upper half of the RAN simulator is responsible to simulate e2 nodes where each E2 node implements an E2 agent using E2AP, and implement service models.
RAN Environment: Lower half of the RAN simulator is responsible to simulate RAN environment to support required RAN functions for implementing E2 service models (e.g. simulating User Equipments (UEs), mobility, etc).
Data Stores: lower half and upper half are connected using data stores that stores information about E2-nodes, E2-agents, UEs, RAN metrics, E2 subscriptions, etc.
RAN simulator APIs: RAN simulator provides a variety of gRPC APIs that can be used for controlling E2 nodes and RAN environment. You can find more details about RAN simulator APIs here: RAN simulator APIs
RAN simulator CLI: RAN simulator is equipped with a command line interface which is integrated with onos-cli that allows to interact with RAN simulator to retrieve required information from data stores, monitor RAN environment changes, create/remove/update RAN entities, metrics, etc. The list of ransim commands is documented here RAN simulator CLI